
宝くじ 当選 ロト 6k8 カジノロボットの荷降ろしやピッキングの正確性を向上 東芝が開発した画像認識AIの実力仮想通貨カジノパチンコまどか ぱちんこ
若林 セレブ 犬k8 カジノ
スロット 五 右 衛門 東芝は2020年11月30日、通常の可視光カメラで撮影した画像から、不規則に積み重なった物体の個々の領域を高精度に推定するAI(人工知能)を開発したと発表した。物流ロボットに開発したAIを組み込むことで、荷降ろしやピッキングの正確性を向上できる。2021年度には市場に、開発したAIを組み込んだ荷降ろしロボットを投入する予定だ。
物流現場における自動化が進む中、倉庫内の荷物の搬送や荷降ろし、ピッキングなどの作業はロボットにより自動化されている。自動荷降ろしロボットやピッキングロボットは、荷物の領域を正しく認識して的確に荷物をつかむ必要がある。
一方でそのためには、対象となる荷物を上から撮影した場合に、荷物同士が乱雑に積み上がり、大きく重なった画像からでも個々の荷物の領域を特定する技術が必要だった。東芝によるとこうした荷物の領域の特定には、これまで3次元センサーを用いた手法が採用されていた。しかしセンサーのコストと事前学習のために必要となる3次元データの収集負担が高いという課題があったという。
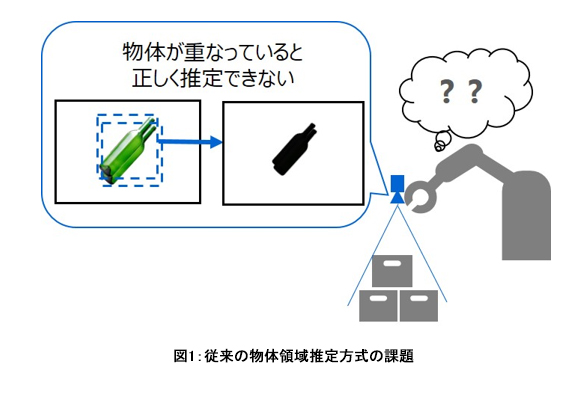 従来の物体領域推定方式の課題(出典:東芝)併せて読みたい関連記事モノタロウ、新設物流センターに日立の自動搬送ロボット400台を導入、3倍超の業務効率化へロボットが品出しするローソン新店舗がオープン Telexistenceの遠隔操作ロボット「Model-T」を活用ヤマトHD「特命DX請負人」は300人のIT・デジタル専門チームで何を変えるのか「コストと事前学習の手間を大幅に削減」 AIが物体領域を推定する仕組みを説明#CmsMembersControl .CmsMembersControlIn {width:100%;background:url(https://image.itmedia.co.jp/images/spacer.gif) #DDD;opacity:0.05;filter:progid:DXImageTransform.Microsoft.Alpha(Enabled=1,Style=0,Opacity=5);z-index:1;}続きを閲覧するには、ブラウザの JavaScript の設定を有効にする必要があります。仮想通貨カジノパチンコ86 テールランプ ヤフオク
従来の物体領域推定方式の課題(出典:東芝)併せて読みたい関連記事モノタロウ、新設物流センターに日立の自動搬送ロボット400台を導入、3倍超の業務効率化へロボットが品出しするローソン新店舗がオープン Telexistenceの遠隔操作ロボット「Model-T」を活用ヤマトHD「特命DX請負人」は300人のIT・デジタル専門チームで何を変えるのか「コストと事前学習の手間を大幅に削減」 AIが物体領域を推定する仕組みを説明#CmsMembersControl .CmsMembersControlIn {width:100%;background:url(https://image.itmedia.co.jp/images/spacer.gif) #DDD;opacity:0.05;filter:progid:DXImageTransform.Microsoft.Alpha(Enabled=1,Style=0,Opacity=5);z-index:1;}続きを閲覧するには、ブラウザの JavaScript の設定を有効にする必要があります。仮想通貨カジノパチンコ86 テールランプ ヤフオク


仮想通貨カジノパチンコビット コイン 流動 性")




仮想通貨カジノパチンココード ギアス スロット 最新")

